mirror of https://github.com/acidanthera/audk.git
667 lines
28 KiB
Markdown
667 lines
28 KiB
Markdown
# **EDK II firmware for Intel(R) Quark SoC X1000 based platforms**
|
|
|
|
## **Features**
|
|
* UEFI firmware image with ability to enable/disable major features such as
|
|
- Logging
|
|
- Source level debug using [Intel(R) UEFI Development Kit Debugger Tool](
|
|
https://firmware.intel.com/develop/intel-uefi-tools-and-utilities/intel-uefi-development-kit-debugger-tool)
|
|
- Boot Performance Measurements
|
|
- UEFI Secure Boot with Physical Presence
|
|
- TCG Measured Boot using TPM 1.2 hardware devices on I2C bus
|
|
* Minimal firmware image for initial power-on and debug
|
|
* UEFI Shell built into FLASH image
|
|
* UEFI Linux operating system boot support from Micro SD FLASH
|
|
* Hardware Support
|
|
- [Intel(R) Quark SoC X1000 CPU](
|
|
http://www.intel.com/content/www/us/en/embedded/products/quark/quark-x1000-datasheet.html)
|
|
- [Intel(R) Galileo Development Board](
|
|
http://www.intel.com/content/www/us/en/embedded/products/galileo/galileo-g1-datasheet.html)
|
|
- [Intel(R) Galileo Gen 2 Development Board](
|
|
http://www.intel.com/content/www/us/en/embedded/products/galileo/galileo-overview.html)
|
|
- HPET Timer
|
|
- Real Time Clock
|
|
* Major I/O Subsystems
|
|
- PCI including support for Mini PCI Express Cards
|
|
- USB using EHCI and OHCI host controllers
|
|
- Micro SD FLASH with FAT file system support
|
|
- Serial UART up to 921600 baud for console, logging, and debug
|
|
* ACPI Tables with ACPI S3 sleep state support
|
|
* SMBIOS Tables
|
|
|
|
## **Windows Build Instructions**
|
|
|
|
### Pre-requisites
|
|
|
|
* GIT client: Available from https://git-scm.com/downloads
|
|
* Microsoft Visual Studio.
|
|
- Visual Studio 2015 recommended and is used in the examples below.
|
|
* Microsoft Windows Driver Development Kit 3790.1830
|
|
- http://download.microsoft.com/download/9/0/f/90f019ac-8243-48d3-91cf-81fc4093ecfd/1830_usa_ddk.iso
|
|
- Mount ISO image
|
|
- Right click on ```x86\kitsetup.exe``` & choose **Run as administrator**
|
|
- Install to C:\WINDDK\3790.1830
|
|
- Uncheck all Component Groups
|
|
- Expand Build Environment Component
|
|
- Check Windows Driver Development Kit 16-bit Additional Build Tools
|
|
- Install
|
|
* ASL compiler: Available from http://www.acpica.org
|
|
- Install into ```C:\ASL``` to match default tools_def.txt configuration.
|
|
|
|
Create a new directory for an EDK II WORKSPACE.
|
|
|
|
The code block below shows the GIT clone operations required to pull the EDK II
|
|
source tree, the FatPkg sources, the pre-built versions of BaseTools as WIN32
|
|
binaries, and the edk2-non-osi repository that provides a binary file for the
|
|
Quark Remote Management Unit (RMU).
|
|
|
|
Next it sets environment variables that must be set before running
|
|
```edksetup.bat```. Since content is being pulled from multiple repositories,
|
|
the EDK II [Multiple Workspace](
|
|
https://github.com/tianocore/tianocore.github.io/wiki/Multiple_Workspace)
|
|
feature is used.
|
|
|
|
Next, the ```edksetup.bat``` file is run to complete the initialization of an
|
|
EDK II build environment. Two example build commands are shown. The first one
|
|
in ```QuarkPlatformPlg/Quark.dsc``` builds a full UEFI firmware image that is
|
|
able to boot the built-in UEFI Shell and Linux from a micro SD FLASH card. The
|
|
second one in ```QuarkPlatformPkg/QuarkMin.dsc``` builds a minimal firmware
|
|
image that is useful for initial power-on and debug of new features.
|
|
|
|
```cmd
|
|
git clone https://github.com/tianocore/edk2.git
|
|
git clone https://github.com/tianocore/edk2-FatPkg.git FatPkg
|
|
git clone https://github.com/tianocore/edk2-BaseTools-win32.git
|
|
git clone https://github.com/tianocore/edk2-non-osi.git
|
|
|
|
set WORKSPACE=%CD%
|
|
set PACKAGES_PATH=%WORKSPACE%\edk2;%WORKSPACE%\edk2-non-osi
|
|
set EDK_TOOLS_BIN=%WORKSPACE%\edk2-BaseTools-win32
|
|
|
|
cd edk2
|
|
edksetup.bat
|
|
|
|
build -a IA32 -t VS2015x86 -p QuarkPlatformPkg/Quark.dsc
|
|
build -a IA32 -t VS2015x86 -p QuarkPlatformPkg/QuarkMin.dsc
|
|
```
|
|
|
|
## **Linux Build Instructions**
|
|
|
|
### Pre-requisites
|
|
|
|
* GIT client
|
|
* GCC 4.9 compiler
|
|
* ASL compiler: Available from http://www.acpica.org.
|
|
|
|
Create a new directory for an EDK II WORKSPACE.
|
|
|
|
The code block below shows the GIT clone operations required to pull the EDK II
|
|
source tree, the FatPkg sources, and the edk2-non-osi repository that provides a
|
|
binary file for the Quark Remote Management Unit (RMU).
|
|
|
|
Next it sets environment variables that must be set before running
|
|
```edksetup.bat```. Since content is being pulled from multiple repositories,
|
|
the EDK II [Multiple Workspace](
|
|
https://github.com/tianocore/tianocore.github.io/wiki/Multiple_Workspace)
|
|
feature is used.
|
|
|
|
Next, the EDK II BaseTools required to build firmware images are built.
|
|
|
|
Next, the ```edksetup.bat``` file is run to complete the initialization of an
|
|
EDK II build environment. Two example build commands are shown. The first one
|
|
in ```QuarkPlatformPlg/Quark.dsc``` builds a full UEFI firmware image that is
|
|
able to boot the built-in UEFI Shell and Linux from a micro SD FLASH card. The
|
|
second one in ```QuarkPlatformPkg/QuarkMin.dsc``` builds a minimal firmware
|
|
image that is useful for initial power-on and debug of new features.
|
|
|
|
```sh
|
|
git clone https://github.com/tianocore/edk2.git
|
|
git clone https://github.com/tianocore/edk2-FatPkg.git FatPkg
|
|
git clone https://github.com/tianocore/edk2-non-osi.git
|
|
|
|
export WORKSPACE=$PWD
|
|
export PACKAGES_PATH=$WORKSPACE/edk2:$WORKSPACE/edk2-non-osi
|
|
export EDK_TOOLS_PATH=$WORKSPACE/edk2/BaseTools
|
|
|
|
make -C edk2/BaseTools
|
|
|
|
cd $WORKSPACE/edk2
|
|
|
|
. edksetup.sh BaseTools
|
|
|
|
build -a IA32 -t GCC49 -p QuarkPlatformPkg/Quark.dsc
|
|
build -a IA32 -t GCC49 -p QuarkPlatformPkg/QuarkMin.dsc
|
|
```
|
|
|
|
## **Build Features**
|
|
|
|
The table below contains a summary of the build flags to enable or disable
|
|
features on the build command line using ```-D``` flags.
|
|
|
|
| **Define Name** | **Default Value** | **Supported Values** |
|
|
| -------------------------- | ----------------- | -------------------- |
|
|
| ```GALILEO``` | GEN2 | GEN1, GEN2 |
|
|
| ```LOGGING``` | TRUE | TRUE, FALSE |
|
|
| ```SOURCE_DEBUG_ENABLE``` | FALSE | TRUE, FALSE |
|
|
| ```PERFORMANCE_ENABLE``` | FALSE | TRUE, FALSE |
|
|
| ```SECURE_BOOT_ENABLE``` | FALSE | TRUE, FALSE |
|
|
| ```MEASURED_BOOT_ENABLE``` | FALSE | TRUE, FALSE |
|
|
| ```TPM_12_HARDWARE``` | NONE | NONE, LPC, ATMEL_I2C, INFINEON_I2C |
|
|
|
|
* ```GALILEO``` - Used to specify the type of Intel(R) Galileo board type. The
|
|
default is ```GEN2``` for the [Intel(R) Galileo Gen 2 Development Board](
|
|
http://www.intel.com/content/www/us/en/embedded/products/galileo/galileo-overview.html).
|
|
The other supported value is ```GEN1``` for the [Intel(R) Galileo Development Board](
|
|
http://www.intel.com/content/www/us/en/embedded/products/galileo/galileo-g1-datasheet.html).
|
|
Add ```-D GALILEO=GEN1``` to the build command for [Intel(R) Galileo Development Board](
|
|
http://www.intel.com/content/www/us/en/embedded/products/galileo/galileo-g1-datasheet.html).
|
|
|
|
* ```LOGGING``` - Used to enable/disable logging messages from DEBUG() macros to
|
|
a serial UART. The default is TRUE for enabled when the BUILDTARGET is DEBUG
|
|
(```-b DEBUG```). The default is FALSE for disabled when the BUILDTARGET is
|
|
not DEBUG (e.g. ```-b RELEASE```). Add ```-D LOGGING``` to the build command
|
|
to force logging enabled. Add ```-D LOGGING=FALSE``` to force logging
|
|
disabled.
|
|
|
|
* ```SOURCE_DEBUG_ENABLE``` - Used to enable/disable source level debug using the
|
|
[Intel(R) UEFI Development Kit Debugger Tool](
|
|
https://firmware.intel.com/develop/intel-uefi-tools-and-utilities/intel-uefi-development-kit-debugger-tool).
|
|
The default is FALSE for disabled. Add ```-D SOURCE_DEBUG_ENABLE``` to the
|
|
build command line to enable source level debug.
|
|
|
|
* ```PERFORMANCE_ENABLE``` - Used to enable/disable boot performance measurement.
|
|
The default is FALSE for disabled. Add ```-D PERFORMANCE_ENABLE``` to the
|
|
build command line to enable boot performance measurement. When this feature
|
|
is enabled, both ```LOGGING``` and ```SOURCE_DEBUG_ENABLE``` are automatically
|
|
disabled so there is not boot time overhead from the serial UART for logging
|
|
messages or the debug agent.
|
|
|
|
* ```SECURE_BOOT_ENABLE``` - Used to enable/disable UEFI Secure Boot features.
|
|
The default is FALSE for disabled. Add ```-D SECURE_BOOT_ENABLE``` to the
|
|
build command line to enable UEFI Secure Boot features.
|
|
|
|
* ```MEASURED_BOOT_ENABLE``` - Used to enable/disable measurement of firmware
|
|
code and data into a TPM 1.2 hardware device. The default is FALSE for
|
|
disabled. Add ```-D MEASURED_BOOT_ENABLE``` to the build command line to
|
|
enable UEFI Secure Boot features.
|
|
|
|
* ```TPM_12_HARDWARE``` - Used to specify the type of TPM 1.2 hardware device
|
|
that is connected to the Galileo board. This define is valid if the measure
|
|
boot feature is enabled using ```-D MEASURED_BOOT_ENABLE```. The default is
|
|
NONE for no TPM 1.2 hardware device connected. Add ```-D TPM_12_HARDWARE=LPC```
|
|
for a TPM hardware device attached to an LPC bus (not supported on on Intel(R)
|
|
Quark SoC X1000). Add ```-D TPM_12_HARDWARE=ATMEL_I2C``` for an
|
|
[Atmel AT97SC3204T](http://www.atmel.com/devices/AT97SC3204T.aspx) or
|
|
[Atmel AT97SC3205T](http://www.atmel.com/images/atmel-8883s-tpm-at97sc3205t-datasheet-summary.pdf)
|
|
attached to the I2C bus of the Galileo Arduino header. Add
|
|
```-D TPM_12_HARDWARE=INFINION_I2C``` for an [Infineon SLB9645](
|
|
http://www.infineon.com/dgdl/Infineon-TPM+SLB+9645-DS-v01_00-EN.pdf?fileId=5546d4625185e0e201518b83d0c63d7c)
|
|
attached to the I2C bus of the Galileo Arduino header. The ATMEL_I2C setting
|
|
has been tested with the [CryptoShield](https://www.sparkfun.com/products/13183)
|
|
available from [SparkFun](https://www.sparkfun.com/).
|
|
|
|
|
|
### **Example Build Commands**
|
|
|
|
Default build with logging enabled:
|
|
|
|
```build -a IA32 -t VS2015x86 -p QuarkPlatformPkg/Quark.dsc```
|
|
|
|
Release build with logging disabled:
|
|
|
|
```build -a IA32 -t VS2015x86 -p QuarkPlatformPkg/Quark.dsc -b RELEASE```
|
|
|
|
Enable source level debugging:
|
|
|
|
```build -a IA32 -t VS2015x86 -p QuarkPlatformPkg/Quark.dsc -D SOURCE_DEBUG_ENABLE```
|
|
|
|
Enable boot performance metrics:
|
|
|
|
```build -a IA32 -t VS2015x86 -p QuarkPlatformPkg/Quark.dsc -D PERFORMANCE_ENABLE```
|
|
|
|
Enable UEFI Secure Boot features:
|
|
|
|
```build -a IA32 -t VS2015x86 -p QuarkPlatformPkg/Quark.dsc -D UEFI_SECURE_BOOT```
|
|
|
|
Enable UEFI Secure Boot and Measured Boot using Atmel I2C TPM hardware device:
|
|
|
|
```build -a IA32 -t VS2015x86 -p QuarkPlatformPkg/Quark.dsc -D UEFI_SECURE_BOOT
|
|
-D MEASURED_BOOT_ENABLE -D TPM_12_HARDWARE=ATMEL_I2C```
|
|
|
|
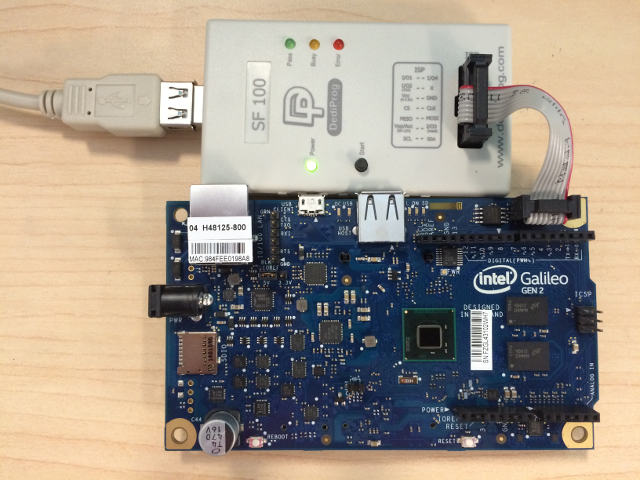
## **FLASH Update using DediProg SF100**
|
|
|
|
Once the sources have been downloaded, an EDK II build environment established,
|
|
and an EDK II firmware image has been built, the EDK II firmware image needs to
|
|
installed into the FLASH device on the target Galileo development board. One
|
|
way to do this is with the [Dediprog SF100 IC Programmer](
|
|
http://www.dediprog.com/pd/spi-flash-solution/SF100).
|
|
|
|
* Install the DediProg SF100 software.
|
|
|
|
* Connect the DediProg SF100 to the Galileo development board.
|
|
|
|
|
|
|
|
* Make sure ```dpcmd.exe``` is in ```PATH```
|
|
|
|
```PATH=%PATH%;"c:\Program Files (x86)\DediProg\SF100"```
|
|
|
|
* **NOTE**: It is recommended that the FLASH image that was shipped with the
|
|
Galileo development board be read and saved before updating FLASH image. The
|
|
command shown below read the FLASH image and saves it to the file
|
|
called ```GalileoOriginalFirmware.bin```.
|
|
|
|
```dpcmd.exe -r GalileoOriginalFirmware.bin```
|
|
|
|
* Update FLASH image using either the DediProg SF100 GUI or ```dpcmd.exe```.
|
|
- Example update of Galileo firmware image when BUILDTARGET is DEBUG (default)
|
|
|
|
```dpcmd.exe -u%WORKSPACE%\Build\Quark\DEBUG_VS2015x86\FV\QUARK.fd ```
|
|
|
|
- Example update of Galileo firmware image when BUILDTARGET is RELEASE
|
|
(```-b RELEASE```)
|
|
|
|
```dpcmd.exe -u%WORKSPACE%\Build\Quark\RELEASE_VS2015x86\FV\QUARK.fd ```
|
|
|
|
## **Setting up a Serial Console and Booting to UEFI Shell**
|
|
|
|
After the FLASH is updated on Galileo, a serial cable is connected between the
|
|
host system and the Galileo target. A serial terminal emulator (such as
|
|
[Tera Term](https://en.osdn.jp/projects/ttssh2/releases/)) can be used to see
|
|
the logging messages from DEBUG() macros and the serial console for the UEFI
|
|
Boot Manager, UEFI Shell, and operating system.
|
|
|
|
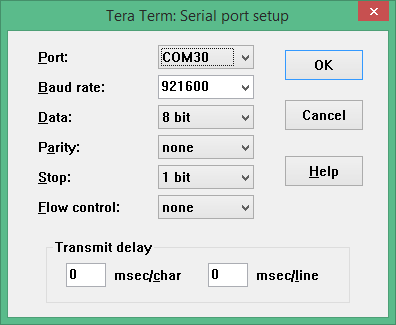
The default serial communication parameters for the Intel(R) Galileo Gen 2
|
|
Development Board is 921600,n,8,1 with no hardware flow control.
|
|
|
|
|
|
|
|
The default serial communication parameters for the Intel(R) Galileo Development
|
|
Board is 461800,n,8,1 with no hardware flow control.
|
|
|
|
The following changes to the [Tera Term](https://en.osdn.jp/projects/ttssh2/releases/)
|
|
configuration files are recommended for UEFI serial console compatibility.
|
|
Some of the later use cases involve using the TCPIP mode, so some of these
|
|
recommendation apply to the TCPIP use cases.
|
|
|
|
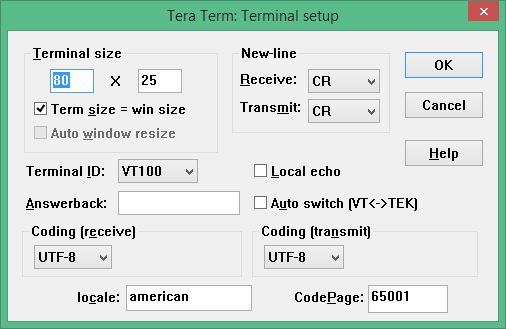
* TERATERM.INI - Set terminal size to 80 x 25 and terminal settings to UTF8.
|
|
|
|
|
|
|
|
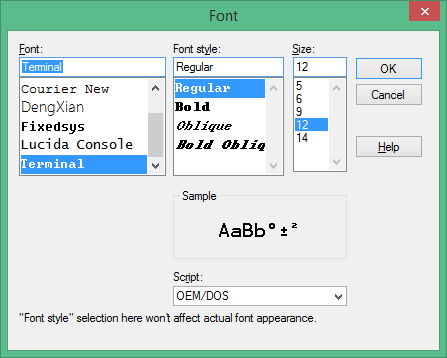
* TERATERM.INI - Set font type to Terminal to support box drawing glyphs.
|
|
|
|
|
|
|
|
* TERATERM.INI - Disable line mode to make TCPIP mode work like COM port mode.
|
|
|
|
```ini
|
|
; Line at a time mode
|
|
EnableLineMode=off
|
|
```
|
|
|
|
* KEYBOARD.CNF - Disable VT function keys for F5..F10
|
|
|
|
```ini
|
|
[VT function keys]
|
|
;F6 key
|
|
;F6=64
|
|
;F7 key
|
|
;F7=65
|
|
;F8 key
|
|
;F8=66
|
|
;F9 key
|
|
;F9=67
|
|
;F10 key
|
|
;F10=68
|
|
```
|
|
|
|
* KEYBOARD.CNF - Disable X function keys for F1..F4
|
|
|
|
```ini
|
|
[X function keys]
|
|
; F1 key
|
|
XF1=off
|
|
; F2 key
|
|
;XF2=60
|
|
XF2=off
|
|
; F3 key
|
|
;XF3=61
|
|
XF3=off
|
|
; F4 key
|
|
;XF4=62
|
|
XF4=off
|
|
; F5 key
|
|
;XF5=63
|
|
```
|
|
|
|
* KEYBOARD.CNF - Add UEFI serial console sequences for F1..F10
|
|
|
|
```ini
|
|
[User keys]
|
|
User1=59,0,$1B[M
|
|
User2=60,0,$1B[N
|
|
User3=61,0,$1B[O
|
|
User4=62,0,$1B[P
|
|
User5=63,0,$1B[Q
|
|
User6=64,0,$1B[R
|
|
User7=65,0,$1B[S
|
|
User8=66,0,$1B[T
|
|
User9=67,0,$1B[U
|
|
User10=68,0,$1B[V
|
|
```
|
|
|
|
Connect power adapter to Galileo development board, and the logging messages
|
|
should be seen, followed by 5 second countdown, followed by an automatic boot to
|
|
the built-in UEFI Shell.
|
|
|
|

|
|
|
|
## **Source Level Debug Using Intel(R) UEFI Development Kit Debugger Tool**
|
|
|
|
### Pre-requisites
|
|
|
|
* Intel(R) UEFI Development Kit Debugger Tool User Manual for Ver 1.5 or higher:
|
|
Available from https://firmware.intel.com/develop/intel-uefi-tools-and-utilities/intel-uefi-development-kit-debugger-tool
|
|
* Intel(R) UEFI Development Kit Debugger Tool Ver 1.5 or higher: Available from
|
|
https://firmware.intel.com/develop/intel-uefi-tools-and-utilities/intel-uefi-development-kit-debugger-tool
|
|
* [Tera Term](https://en.osdn.jp/projects/ttssh2/releases/) or other serial
|
|
terminal emulator with TCPIP support
|
|
|
|
Follow instructions in Intel(R) UEFI Development Kit Debugger Tool User manual
|
|
to setup host system.
|
|
|
|
Build a firmware image with SOURCE_DEBUG_ENABLE enabled
|
|
(```-D SOURCE_DEBUG_ENABLE```). This will select the appropriate libraries,
|
|
debug agent, and PCDs for Galileo. Galileo does not support a USB 2.0 debug
|
|
port, so only the UART based communications library is used.
|
|
|
|
Use Dediprog SF100 to update the Galileo development board FLASH image.
|
|
|
|
Update the ```[Debug Port]``` section of the SoftDebugger.ini file with the host
|
|
side UART configuration settings. The following example uses COM5, which must
|
|
be updated with the COM port the Galileo target is attached. The following
|
|
example also shows a baud rate of 921600 which is correct for a Galileo Gen 2.
|
|
If a Galileo Gen 1 is being used, set the baud rate to 460800. By default, the
|
|
Galileo console is redirected to TCPIP port 20715.
|
|
|
|
```ini
|
|
[Debug Port]
|
|
Channel = Serial
|
|
Port = COM5
|
|
FlowControl = 0
|
|
BaudRate = 921600
|
|
Server =
|
|
```
|
|
|
|
Connect power adapter to Galileo development board and run a command script with
|
|
the contents below to start a Tera Term session on TCPIP port 20715 and start
|
|
the Intel(R) UEFI Development Kit Debugger Tool using UART connection between
|
|
the host and target and WinDbg. The REBOOT button on the Galileo development
|
|
board may need to be pressed for the debugger to perform the initial connect.
|
|
|
|
```cmd
|
|
start "Console" /B "c:\Program Files (x86)\teraterm\ttermpro.exe" localhost:20715 /nossh
|
|
start "Debugger" /B "C:\Program Files (x86)\Intel\Intel(R) UEFI Development Kit Debugger Tool\eXdi.exe" /LaunchWinDbg
|
|
```
|
|
|
|
The figure below should be seen when a connection is made. The SoftDebugger
|
|
Debug Console window shows the status of the connection between the host and the
|
|
target. The Tera Term window shows the console output from the SEC phase until
|
|
the debug agent is initialized. The WinDbg window shows that the debugger is
|
|
connected and the WinDbg application can be used for run control, breakpoint
|
|
management, and viewing call stacks, local variables, global variables, etc.
|
|
|
|

|
|
|
|
## **Debug Using Intel(R) System Debugger using OpenOCD**
|
|
|
|
Setup hardware and software components following the instructions in the article at:
|
|
https://software.intel.com/en-us/articles/using-intel-system-debugger-with-openocd
|
|
|
|
Connect power adapter to Galileo development board.
|
|
|
|
The following batch file starts Tera Term serial console on COM5 at 921600 baud,
|
|
starts OpenOCD using a Flyswatter2, and starts Intel(R) System Studio Debugger.
|
|
Select the **Connect** button to complete the host to target connection.
|
|
|
|
```cmd
|
|
set OPENOCD="C:\Program Files (x86)\IntelSWTools\system_studio_for_windows_2016.0.023\debugger\openocd"
|
|
start "Console" /B "c:\Program Files (x86)\teraterm\ttermpro.exe" /C=5 /BAUD=921600
|
|
start "OpenOcd" /B %OPENOCD%\bin\openocd.exe -f ..\scripts\interface\ftdi\flyswatter2.cfg -f ..\scripts\board\quark_x10xx_board.cfg
|
|
call "C:\Program Files (x86)\IntelSWTools\System Debugger 2016\system_debugger\start_xdb_gdb_remote.bat"
|
|
```
|
|
|
|
When **Reset Target** is selected, the Galileo development board does not always
|
|
halt at the first instruction at the reset vector. If debug is required from
|
|
the first instruction of the reset vector, then update the file
|
|
```UefiCpuPkg/SecCore/Ia32/ResetVector.asm``` and change the two NOP
|
|
instructions at the label ```ResetHandler:``` to ```JMP $```. This puts the CPU
|
|
into a wait loop until the debugger is connected and the debugger is used to set
|
|
instruction pointer to the next instruction.
|
|
|
|
```
|
|
;
|
|
; For IA32, the reset vector must be at 0xFFFFFFF0, i.e., 4G-16 byte
|
|
; Execution starts here upon power-on/platform-reset.
|
|
;
|
|
ResetHandler:
|
|
; nop
|
|
; nop
|
|
jmp $
|
|
ApStartup:
|
|
;
|
|
; Jmp Rel16 instruction
|
|
; Use machine code directly in case of the assembler optimization
|
|
; SEC entry point relative address will be fixed up by some build tool.
|
|
;
|
|
; Typically, SEC entry point is the function _ModuleEntryPoint() defined in
|
|
; SecEntry.asm
|
|
;
|
|
DB 0e9h
|
|
DW -3
|
|
```
|
|
|
|
## **Install, Configure, and Boot Linux**
|
|
|
|
* Download SD Card Linux Image: Available at
|
|
http://www.intel.com/content/www/us/en/support/boards-and-kits/intel-galileo-boards/000005614.html
|
|
* Extract the SD Card Linux Image to a FAT formatted Micro SD FLASH device
|
|
* Install Micro SD FLASH device into Galileo development board
|
|
|
|
Connect power adapter to Galileo development board and boot to the UEFI Shell.
|
|
|
|
From the UEFI Shell execute the following commands to copy the GRUB EFI boot
|
|
loader to ```\efi\boot\bootia32.efi```. This allows the UEFI Boot Manager, on
|
|
all future boots, to auto detect that the Micro SD FLASH device is bootable.
|
|
|
|
```
|
|
Shell> connect -r
|
|
Shell> map -r
|
|
Shell> fs0:
|
|
FS0:> mkdir efi
|
|
FS0:> mkdir efi\boot
|
|
FS0:> cp grub.efi efi\boot\bootia32.efi
|
|
```
|
|
|
|
The GRUB boot loader is set to a UART baud rate of 115200. A couple changes are
|
|
required to change the baud rate to 460800 for Galileo Gen 1 or 921600 for
|
|
Galileo Gen 2. From the UEFI Shell, execute the following commands to make a
|
|
backup copy and edit the GRUB configuration file.
|
|
|
|
```
|
|
FS0:> cp boot\grub\grub.conf boot\grub\grub.conf.org
|
|
FS0:> edit boot\grub\grub.conf
|
|
```
|
|
|
|
* Delete the lines associated with the boot option with the following title.
|
|
|
|
```
|
|
title Clanton SVP kernel-SPI initrd-SPI IMR-On IO-APIC/HPET NoEMU
|
|
```
|
|
|
|
* Replace the two instances of 115200 in the following line to 460800 for
|
|
Galileo Gen 1 or 921600 for Galileo Gen 2.
|
|
|
|
```
|
|
kernel /bzImage root=/dev/ram0 console=ttyS1,115200n8 earlycon=uart8250,mmio32,$EARLY_CON_ADDR_REPLACE,115200n8 reboot=efi,warm apic=debug rw LABEL=boot debugshell=5 rootimage=image-full-galileo-clanton.ext3
|
|
```
|
|
* Press F3 to save the file
|
|
* Run the ```exit``` command to exit from the UEFI Shell and return to the
|
|
UEFI Boot Manager
|
|
* Select **Boot Manager**
|
|
* Select **UEFI Misc Device** for the Micro SD FLASH device.
|
|
* GRUB should run and Linux should boot with serial log messages.
|
|
* When the serial log messages stop, change the Tera Term baud rate to 115200
|
|
* Login as ```root```. No password is required.
|
|
* Use ```vi``` to edit ```/etc/inittab```
|
|
* Change the baud rate of ttyS1 from 115200 to 460800 for Galileo Gen 1 or
|
|
921600 for Galileo Gen 2. The line that need to be updated is shown below
|
|
|
|
```
|
|
S:2345:respawn:/sbin/getty 115200 ttyS1
|
|
```
|
|
|
|
* Save the updated ```/etc/inittab```
|
|
* Run ```reboot -f``` to shutdown Linux and reboot the platform.
|
|
* Set the Tera Term baud rate back to 460800 for Galileo Gen 1 or 921600 for
|
|
Galileo Gen 2.
|
|
|
|
After these changes both the EDK II firmware and the Linux operating system use
|
|
the same baud rate.
|
|
|
|
### **Testing ACPI S3 Sleep**
|
|
|
|
The ACPI S3 Sleep and Resume feature can be tested on a Galileo development
|
|
board using the Real Time Clock (RTC) for a wake event. The shell script shown
|
|
below arms the RTC wake alarm 10 seconds in the future and puts the system to
|
|
sleep. A shorter time in seconds can be passed in as the first argument to the
|
|
script, but do not use times shorter than 2 or 3 seconds.
|
|
|
|
**NOTE**: The stmmac module is unloaded because the module is not compatible
|
|
with S3 resume.
|
|
|
|
```sh
|
|
#
|
|
# Unload NIC driver that causes S3 to fail
|
|
#
|
|
rmmod stmmac
|
|
|
|
#
|
|
# Disable RTC wake alarm
|
|
#
|
|
echo 0 > /sys/class/rtc/rtc0/wakealarm
|
|
|
|
#
|
|
# Compute wake time that is $1 seconds in the future
|
|
#
|
|
let WakeTime=`date '+%s'`
|
|
echo $WakeTime
|
|
if ["$1" = ""]; then
|
|
let WakeTime=$WakeTime+10
|
|
else
|
|
let WakeTime=$WakeTime+$1
|
|
fi
|
|
echo $WakeTime
|
|
|
|
#
|
|
# Enable RTC wake alarm $1 seconds in the future
|
|
#
|
|
echo $WakeTime > /sys/class/rtc/rtc0/wakealarm
|
|
|
|
#
|
|
# Put systems into ACPI S3 sleep state
|
|
#
|
|
echo mem > /sys/power/state
|
|
```
|
|
|
|
## **UEFI Secure Boot Feature and Physical Presence**
|
|
|
|
Build a firmware image with SECURE_BOOT_ENABLE enabled
|
|
(```-D SECURE_BOOT_ENABLE```). This builds in support for UEFI authenticated
|
|
variables, UEFI image verification, and UEFI Secure Boot configuration screens
|
|
in the Device Manager. In order to change the UEFI Secure Boot configuration,
|
|
the user must assert physical presence. The Galileo development board only has
|
|
two push buttons (REBOOT and RESET). The REBOOT button unconditionally reboots
|
|
the platform. The RESET button asserts the reset signal on the Arduino header
|
|
and is also connected to a GPIO pin, so the state of the RESET button can be
|
|
read. The user asserts physical presence by holding the RESET button while the
|
|
Galileo development board boots, or by holding the RESET button while selecting
|
|
the **Secure Boot Configuration** option in the Device Manager.
|
|
|
|
Use Dediprog SF100 to update the Galileo development board FLASH image.
|
|
|
|
Connect power adapter to Galileo development board and boot to the UEFI Boot
|
|
Manager by pressing F2 or running the ```exit``` command from the UEFI Shell.
|
|
Select **Device Manager** and then**Secure Boot Configuration**. Change
|
|
**Customize Secure Boot** to **Customized** and then select **Custom Secure Boot
|
|
Options**. If **Custom Secure Boot Options** can not be selected, then physical
|
|
presence was not asserted using one of two methods listed above. Assert
|
|
physical presence and try again.
|
|
|
|
The **Custom Secure Boot Options** screen allows the Galileo development board
|
|
to be enrolled into UEFI Secure Boot. See [How to Sign UEFI Drivers & Application V1.31](
|
|
http://sourceforge.net/projects/edk2/files/General%20Documentation/SigningUefiImages%20-v1dot31.pdf/download)
|
|
in the [SecurityPkg Wiki](https://github.com/tianocore/tianocore.github.io/wiki/SecurityPkg)
|
|
for details on how to complete the UEFI Secure Boot enrollment.
|
|
|
|
## **Enable Measured Boot Feature using Atmel I2C TPM on CryptoShield**
|
|
|
|
Build a firmware image with MEASURED_BOOT_ENABLE enabled
|
|
(```-D MEASURED_BOOT_ENABLE```) and TPM_12_HARDWARE set to ATMEL_I2C
|
|
(```-D TMP_12_HARDWARE=ATMEL_I2C```). This builds in the TCG PEIM and DXE
|
|
modules and uses the library for the Atmel I2C TPM hardware device.
|
|
|
|
Use Dediprog SF100 to update the Galileo development board FLASH image.
|
|
|
|
Attach the CryptoShield to the Arduino header of the Galileo development board
|
|
as shown below.
|
|
|
|

|
|
|
|
Connect power adapter to Galileo development board and boot to the UEFI Shell.
|
|
In the boot logging messages, messages similar to the following should be seen
|
|
as the Atmel I2C TPM hardware device is detected and used to measure the
|
|
contents of firmware volumes and firmware tables.
|
|
|
|
```
|
|
Loading PEIM at 0x0000FC75188 EntryPoint=0x0000FC75260 TrEEConfigPei.efi
|
|
PROGRESS CODE: V03020002 I0
|
|
TrEEConfiguration.TpmDevice from Setup: 1
|
|
DetectTpmDevice:
|
|
TpmDevice final: 1
|
|
TpmDevice PCD: 8B01E5B6-4F19-46E8-AB93-1C53671B90CC
|
|
. . .
|
|
Loading PEIM at 0x0000FC70190 EntryPoint=0x0000FC70260 TcgPei.efi
|
|
PROGRESS CODE: V03020002 I0
|
|
Install PPI: E9DB0D58-D48D-47F6-9C6E-6F40E86C7B41
|
|
Install PPI: A030D115-54DD-447B-9064-F206883D7CCC
|
|
PROGRESS CODE: V03020003 I0
|
|
The FV which is measured by TcgPei starts at: 0xFFF10000
|
|
The FV which is measured by TcgPei has the size: 0xF0000
|
|
The FV which is measured by TcgPei starts at: 0xFFD00000
|
|
The FV which is measured by TcgPei has the size: 0x1E0000
|
|
. . .
|
|
Loading driver at 0x0000F620000 EntryPoint=0x0000F620260 TcgDxe.efi
|
|
. . .
|
|
TPM TcgDxe Measure Data when ReadyToBoot
|
|
```
|
|
See the [SecurityPkg Wiki](https://github.com/tianocore/tianocore.github.io/wiki/SecurityPkg)
|
|
for additional details on EDK II TPM support
|
|
|
|
## **Measuring Boot Performance**
|
|
|
|
Build a firmware image with PERFORMANCE_ENABLE enabled
|
|
(```-D PERFORMANCE_ENABLE```). This builds in the UEFI Shell and the DP.EFI
|
|
(Dump Performance) into a firmware volume and also includes a simple file system
|
|
driver for firmware volumes so the DP.EFI command can be run out of the FLASH.
|
|
|
|
Use Dediprog SF100 to update the Galileo development board FLASH image.
|
|
|
|
Connect power adapter to Galileo development board and let it boot to the UEFI
|
|
Shell. Then use the REBOOT button or the ```reset``` UEFI Shell command to
|
|
reboot the Galileo development board. The first boot after a FLASH update does
|
|
extra work that is only performed one time. In order to get correct performance
|
|
measurements, use the 2nd or later boots. After the 2nd boot, run the
|
|
```dp -s``` command. The output should look similar to the figure below.
|
|
|
|

|